使用示波器將
伺服電機編碼器信號調零過程詳解!
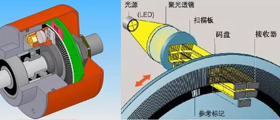
增量編碼器在自動化系統中起著至關重要的作用,正確的信號識別和零定位對系統的正常運行至關重要。本文探討了如何使用示波器檢測增量編碼器信號的正常性,并分析了帶有換向信號的
增量編碼器的調零方法,以幫助用戶更好地理解和操作編碼器,確保系統的可靠性和準確性。

編碼器信號工程大分析:示波器應用與伺服電機調零能力傳輸網絡詳解模型
1、用示波器捕捉編碼器信號的步驟:
電源:將編碼器電源線連接到穩定的+5V電源。
波形觀測:
將示波器的正極分別連接到A+、B+,并將負極連接到電源的負極。旋轉編碼器波形,觀察顯示的相位差為90°的波形。
將示波器的正極連接到A或B,并將負極連接到電源的負極。旋轉編碼器軸,觀察顯示的相位差為90°的波形。
將示波器的正極分別連接到A+、A- 并且將負極連接到電源的負極。旋轉編碼器波形,觀察顯示的相位差為180°的波形。
將示波器的正極分別連接到B+、B-并將負極連接到電源的負極。旋轉編碼器軸,觀察顯示的相位差為180°的波形。
將示波器的正極連接到Z+,將負極連接到電源的負極。旋轉編碼器軸,每轉輸出一個波形。
如果
電機編碼器輸出方波,則所有信號的工作周期應為50%。
2、增量伺服電機編碼器的調零方法分析:
UVW電子換向信號:
在小于額定電流U-in和V-out的情況下,向電機的UV繞組施加DC,并將電機軸定向到對稱位置。
用示波器觀察編碼器的U相信號和Z相信號。
設置編碼器軸和電機軸之間的相對位置。
在設置過程中,觀察編碼器跳沿的U相信號和Z信號,直到Z信號穩定在高電平。
這里,Z信號的正常狀態被設置為低電平,阻斷了編碼器和電機之間的相對位置關系。
前后旋轉電機軸,如果Z信號每次自由返回對稱位置時都穩定在高電平,則對齊有效。
通過學習如何使用示波器檢測編碼器信號和增量伺服電機編碼器調零方法,用戶可以更深入地了解和操作這一關鍵部件。編碼器信號的正確檢測有助于提高系統的穩定性,而零點設置方法的分析則允許用戶更準確地調整伺服電機,并確保其準確性和可靠性。
了解更多
編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn