詳解
編碼器分辨率、精度、可重復性
編碼器反饋對許多自動化應用程序的性能至關重要。適當指定的編碼器將提供支持有效定位所需的結果,價格符合預算。如果指定不當,會降低系統性能。為了理解如何和為什么,我們需要討論準確性、分辨率和可重復性等概念,因為它們適用于
編碼器。
編碼器的分辨率
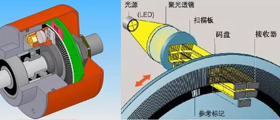
編碼器分辨率圖編碼器分辨率是編碼器軸的一次旋轉或線性尺度的1英寸/毫米的測量段或單位的數目。編碼器分辨率通常是在每次旋轉脈沖(PPR)中測量的,用于增量編碼器和絕對編碼器的比特。

編碼器脈沖指編碼器能夠測量或顯示的給定物理量的最小部分。換句話說,它是編碼器可以用來監控設備的粒度。在一個光學編碼器代碼盤 清晰度越高,分辨率就越高。
旋轉編碼器的分辨率最高可達10,000脈沖每次革命(PPR)和40,000PPR通過插值。線性尺度提供的分辨率為微米級。
了解如何計算正確的編碼器分辨率為您的應用程序
關于編碼器的一個常見的誤解是,假設一個更高的分辨率可以提高整個系統的準確性。必須指出,增加分辨率并不能補償后一種類型的錯誤(見圖1)。每次旋轉增加更多的脈沖可能提高編碼器報告位置的能力,但如果有系統性錯誤,更高的分辨率不會糾正它。

上述兩個例子的分辨率完全相同(24次),但準確性卻截然不同。這是一個高分辨率無法提高精度的例子.
編碼器的準確性
編碼器的準確性是對編碼器讀取的值與被測量的實際物理值之間的誤差的衡量。編碼器的精確度以20/度(0.3度)的弧度或弧度來衡量,一般認為這是一種高精度編碼器,具有大約5/度(0.0014度)的一些精密裝置。
編碼器讀取的準確性可以被多個錯誤源降低。其中一個來源可以是編碼器本身。例如,光學編碼器磁盤上的線的寬度可以有所不同。這可能會在編碼器產生的脈沖的時間上引入一個小的錯誤。如果知道錯誤的數量,它可以由控制器校準。一種發現誤差的方法是使用一個外部的高精度編碼器來測量誤差的數量,然后再進行校準,然后移除精確編碼器,這樣系統就可以在比以前更高的精度上運行。
在其他情況下,錯誤是由于被監測的設備造成的。變速箱可能會產生反作用,或者在其運動中可能會產生鉛螺絲。重要的是要記住編碼器只能報告它所監視的設備的位置。如果有機械錯誤,編碼器不能提高性能。
編碼器的可重復性
編碼器的第三個關鍵特征是可重復性。可重復性是衡量系統如何一致地返回到相同的命令位置的一個尺度。對于編碼器,重復性通常比準確性好2-10倍。與精度一樣,重復性也有來自多個來源的誤差貢獻,包括編碼器和被定位的設備。雖然某些類型的編碼器,如電容式編碼器,在多個周期中累積錯誤,但這是例外,而不是常規。用于自動化的最常用編碼器類型,如光學編碼器和磁性編碼器,是為了防止累積錯誤而設計的。
系統的可重復性可以通過系統中的機械誤差來降低,這些誤差包括傳動阻力、滯后、不適當的張力帶等。與分辨率一樣,用戶經常認為購買一個具有很高重復性的編碼器會產生最佳效果。但情況并非如此。即使是幾乎完全可重復性的編碼器也無法改進機械重復性差的系統。編碼器能做的就是報告。
一個系統可以有非常高的重復性和不準確性。相反,一個系統可以顯示高精度,但重復性差。
精確性是指絕對定位值,而重復性則是指系統以相同的精確度重復相同動作的能力。高精度和高重復性可能看起來是理想的,但權衡的是系統成本高,應用可能不是那樣的性能水平。同時,高重復性可能仍不能滿足系統的需要,如果應用確實強調精度。零精度和低重復性通常不服務于任何應用。
為了優化性能,系統設計者需要選擇一個編碼器,提供正確的準確性、分辨率和可重復性的混合。例如,對于選擇和放置應用程序來說,最好的選擇可能是一個編碼器,它的操作精度適中,但可重復性很高。編碼器的精度誤差可以被校準出來,而重復性可以保證機器人手臂每次都能達到相同的位置。縮短長度的應用程序可能會從高精度中獲益,但重復性有限。
了解更多
增量編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn