怎么使用
編碼器來測量速度和角度?
在現代工業中,許多機械設備的工作速度和角度都必須精確測量,以確保工作的穩定性和準確性。為了實現這一目標,通常使用旋轉編碼器,特別是增量編碼器。接下來,西安德伍拓為大家介紹如何用旋轉編碼器測量軸的速度和角度,以及在軟件編程中的具體想法。
 1、編碼器的安裝與連接
1、編碼器的安裝與連接
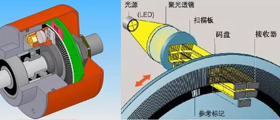
首先,我們需要在測試軸上安裝一個合適的旋轉編碼器。通常,您選擇增量編碼器,并使用相位A和相位B的輸出測量正旋轉和負旋轉。要測量角位置,最好使用具有Z相位輸出的編碼器。
安裝編碼器后,我們需要將其輸出端連接到測量控制器。控制器可以是微控制器、DSP、擴展單元、CNC加工卡或伺服驅動器,可以根據不同的接口電路選擇相應的編碼器輸出類型,如集電極開路輸出或差分輸出。
2、編寫軟件程序
連接測量控制器后,我們需要編寫適當的軟件程序來正確讀取和解析編碼器輸出,并計算速度和角度。
使用編碼器進行速度測量
對于速度測量,我們可以使用PLC(可編程邏輯控制器)來實現這一點。以下想法是使用三菱PLC來測量速度:
步驟1:在指定的時間間隔內,對特定寄存器(假設D0)的輸入脈沖數進行計數。
步驟2:計算速度N=60000/(N,t),其中N表示編碼器每轉發出的脈沖數,t表示指定的測量時間(毫秒)。
在這種方法中,測量精度和編碼器分辨率與測量時間寬度成反比。換句話說,測量時間越長,精度就越高,但在更高的速度(超過200°RPM)下,5°以下可能會出現誤差。
使用編碼器進行角度測量
如果我們想測量角位置,我們可以簡單地累積編碼器的Z相脈沖的數量和A相或B相計數脈沖的數量。通過這種方式,我們可以獲得整個圓內的當前位置及其相對于起點的角度。
3、注意事項
使用旋轉編碼器測量速度和角度時,需要考慮以下幾點:
脈沖速度限制:控制器應在可接受的脈沖速度范圍內以最高速度運行,否則測量結果可能不準確。
編碼器分辨率:選擇適當的編碼器分辨率以滿足測量要求。更高的分辨率可以提供更高的精度,但也需要更多的計算資源。
測量時間:適當選擇測量時間,以平衡測量精度和實時性能。較短的測量時間可以提供實時測量結果,但會影響一些精度。
環境干擾:使用編碼器時,應注意避免可能導致測量干擾的環境因素,如電磁干擾、振動等。
總之,使用旋轉編碼器測量速度和角度是工業部門的常見用途。通過選擇合適的編碼器類型和編寫合適的軟件程序,我們可以獲得高精度的測量結果。同時,我們需要注意控制器的脈沖速度限制和環境干擾,以確保測量的準確性和可靠性。在實踐中,為了滿足不同工業工廠的要求,會對特定情況進行優化和適應。
了解更多
旋轉編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn