淺析
增量編碼器的A/B輸出波形
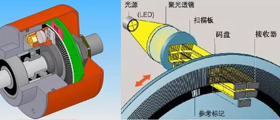
增量編碼器的核心部件——碼盤,由精細(xì)的光柵刻線構(gòu)成。這些刻線被兩個(或更多,如四個光眼的情況,后文將討論)光眼讀取,以產(chǎn)生A、B信號。刻線的密集程度直接決定了編碼器的分辨率,即能夠精確捕捉的最小角度變化。分辨率的參數(shù)通常以每轉(zhuǎn)脈沖數(shù)(PPR)來表示。例如,若碼盤每圈有360條刻線,則A、B信號每圈各輸出360個脈沖,此時分辨率即為360PPR。
那么,這樣的編碼器能分辨的最小角度變化是多少度呢?是否就是1度?
增量編碼器的A/B輸出波形主要分為兩類:一類是具有陡峭上升沿和下降沿的方波信號;另一類則是波形平滑,類似正弦曲線的Sin/Cos波形信號。在Sin/Cos波形中,A與B相差1/4周期(即90度相位)。若A為類正弦Sin波形,則B為類余弦Cos波形。
對于方波信號而言,A、B兩相相差90度相位(即1/4T),這使得在0度、90度、180度和270度這四個相位角位置,均有上升沿和下降沿的出現(xiàn)。因此,在1/4T的方波周期內(nèi),即可判斷角度的變化。這個1/4T周期即為最小測量步距。通過電路對上升沿和下降沿的識別,可以實(shí)現(xiàn)4倍于PPR的角度變化讀取,即方波的四倍頻。這種判斷也可以通過邏輯操作來實(shí)現(xiàn),其中0代表低電平,1代表高電平,A/B兩相在一個周期內(nèi)的變化依次為00、01、11、10。這種判斷方式不僅能實(shí)現(xiàn)四倍頻,還能確定旋轉(zhuǎn)方向。

圖為增量編碼器碼盤照片
據(jù)此,方波信號的最小分辨角度為360度除以(4乘以PPR)。以一個360PPR的方波A/B輸出增量編碼器為例,其最小分辨角度為0.25度。

圖為增量編碼器波形圖
需要強(qiáng)調(diào)的是,方波信號最高僅能實(shí)現(xiàn)四倍頻。盡管有時差法可以進(jìn)一步細(xì)分,但這并非增量編碼器的推薦用法。更高的細(xì)分則需采用Sin/Cos類正余弦信號。后續(xù)電路可通過讀取波形相位的變化,利用模數(shù)轉(zhuǎn)換電路進(jìn)行細(xì)分,如5倍、10倍、20倍,甚至100倍以上,然后再以方波形式輸出(以PPR表示)。但細(xì)分倍數(shù)并非無限,受到模數(shù)轉(zhuǎn)換的時間響應(yīng)問題和編碼器刻線精度等因素的限制。
例如,德國海德漢的工業(yè)編碼器推薦的最佳細(xì)分倍數(shù)為20倍,更高的細(xì)分適用于其推薦的精度更高的角度編碼器,但旋轉(zhuǎn)速度需降低。
對于細(xì)分后的增量編碼器,若輸出A/B/Z方波信號,仍可再次進(jìn)行四倍頻。但請注意,細(xì)分對編碼器的旋轉(zhuǎn)速度有要求,通常較低。若原始碼盤刻線精度不高、波形不完美,或細(xì)分電路存在限制,細(xì)分可能會導(dǎo)致波形嚴(yán)重失真、大小步、丟步等問題。因此,在選用和使用時需注意。
以一個正余弦A/B輸出360PPR的增量編碼器為例,若采用25倍分頻,且原始碼盤精度有保證,其最小分辨角度可能達(dá)到0.01度。
此外,有些增量編碼器的原始刻線可以達(dá)到2048線(2的11次方,即11位),通過16倍(4位)細(xì)分后得到15位PPR,再經(jīng)過4倍頻(2位)處理,最終獲得17位(Bit)的分辨率。這就是某些日系編碼器所謂的17位高位數(shù)編碼器的由來。它們通常以“位(Bit)”來表示分辨率。然而,在較快速度下,這些編碼器內(nèi)部仍需使用未細(xì)分的低位信號進(jìn)行處理,以確保響應(yīng)速度。因此,不要被其“17位”的表述所迷惑。
了解更多
編碼器相關(guān)知識,敬請關(guān)注西安德伍拓自動化傳動系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團(tuán)隊(duì)為您免費(fèi)提供編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因?yàn)榫幋a器技術(shù)人員的短缺帶來的損失,采取拉線上+拉線下服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。








有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn