如何在定位控制中選擇合適的
編碼器產品?
從旋轉編碼器的觀點出發,對通過自動控制實現位置控制的方法進行說明。因為還有其他可以實現標尺光柵和激光等位置的線性傳感器,所以如果用旋轉編碼器實現的話,頻率變換控制和伺服也可以,但基本上信號的原理是增量信號、絕對值信號、信號脈沖、總線信號都一樣。
位置控制或定位控制廣泛用于起重機高度、無軌和無軌定位、冶金鼓風爐內氧槍定位、與水利閘雙向同步定位、醫療床位定位等自動控制。可提供多種情況,如后置轉臺的角度定位、撥叉突出長度和高度定位、模鑄拋光工具定位、沖壓機高度定位、橡膠與塑料機械同步定位等,重要的只是距離測量定位控制仍然有嚴格的要求。在定位控制的情況下,以下動作基于前一路徑的位置,不能進行錯誤或自動控制,如果雙向同步錯誤,則被廢棄的設備。是的,必須使用絕對值編碼器。

對于距離測量應用程序,從技術角度看,可以同時使用增量編碼器和絕對式編碼器。絕對式編碼器的優點體現在精度性能上,而增量編碼器更經濟實用。
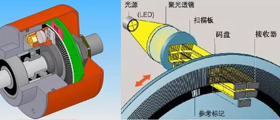
最常見類型的旋轉編碼器
1、增量編碼器可以使用單匝增量編碼器或絕對式編碼器實際實現多圈位置檢測和記錄功能,但要成功完成,必須依賴于設備系統的正常運行。另外,如果想取得位置測量數據的精度、安全性、可靠性,則意味著返回代碼的唯一性,因此需要考慮使用多圈絕對式編碼器。
返回碼的唯一性意味著編碼器不會在特定的旋轉周期范圍內輸出重復信號,每個角度的位置碼都是唯一的。
當使用增量編碼器進行位置測量時,設備的信號輸入系統必須基于編碼器側返回的連續重復脈沖對位置進行計數。因為增量編碼器在旋轉時總是重復相同的脈沖代碼(例如,正交相位A/B增量編碼器輸出總是相位A/B0/1的代碼),所以其信號輸出不唯一。
2、在使用單轉轍器編碼器、單轉轍器編碼器處理多轉轍器位置應用程序時,設備系統還需要累計轉速,同時獲取反饋位置代碼。單匝絕對值編碼編碼器只能在機械軸旋轉一圈的范圍內實現位置信號輸出的唯一性。也就是說,您可以使用單圈編碼器來測量角度或測量圓周。
因此,在設備運行期間可能出現的各種意外情況,如控制程序的異常操作、系統與編碼器之間的電連接斷開、設備故障或電源斷開、信號線干擾等。等已棄用的函數的缺少的支持。操作中的位置計數和轉速累積錯誤或清除等同于中斷位置測量過程。因此,發生上述情況時,需要在系統恢復時的編碼器位置軸上進行原來的校準初始化操作,機器的不穩定性和事故的可能性變高。
3、僅限于目標范圍(即測量行程),在位置測量中使用多圈絕對式編碼器的多圈絕對式編碼器)編碼器的旋轉范圍內時,設備系統無需執行位置計數和旋轉累積。算法處理的側面直接引用編碼器輸出的數據。在多圈范圍內沒有重復位置信號輸出,所有值都是唯一的。
機器的位置測量只依賴于編碼器的反饋輸出,與電氣控制系統無關。位置測量的最終結果不受上述電氣系統意外故障的影響。中斷檢測操作過程。這可以節省在設備重新啟動操作時初始化原始校準的復雜操作,并提高安全性、可靠性、性能和操作效率。這種獨立穩定的位置檢測性能實際上是使用多圈絕對式編碼器的意義和價值。
了解更多編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供
編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取“線上+線下”服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn